Taekyung (TK) Lee
EE (Intelligent Systems)+ Robotics + Control & Dynamical Systems (CDS)
Passionate about multi-agent systems, learning-based control, and reinforcement learning

Passionate about multi-agent systems, learning-based control, and reinforcement learning
I am an Electrical Engineering student at the California Institute of Technology (Caltech), pursuing the Intelligent Systems track with a minor in Robotics, Control & Dynamical Systems. My research interests lie at the intersection of multi-agent systems, learning based control, and reinforcement learning.
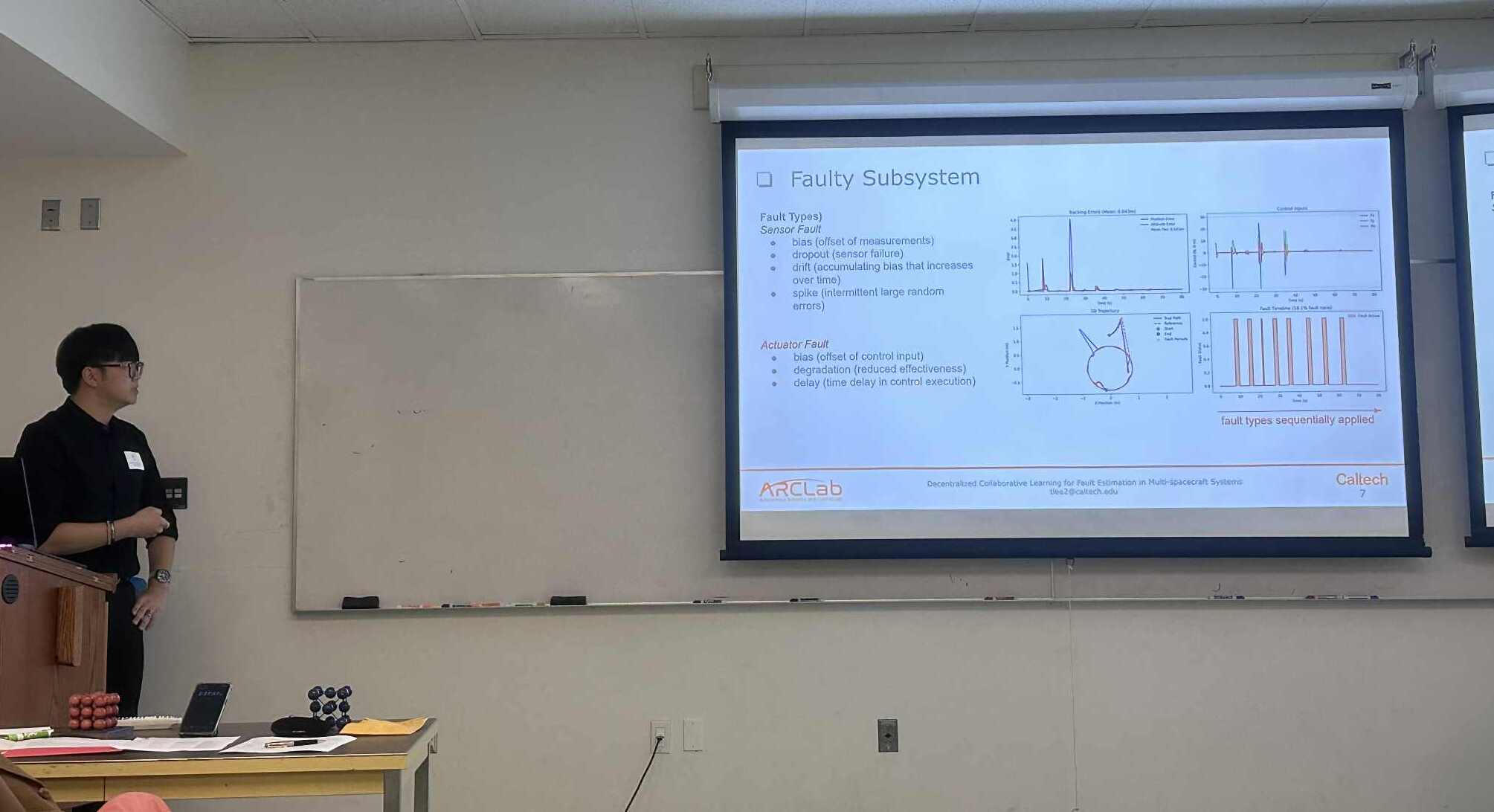
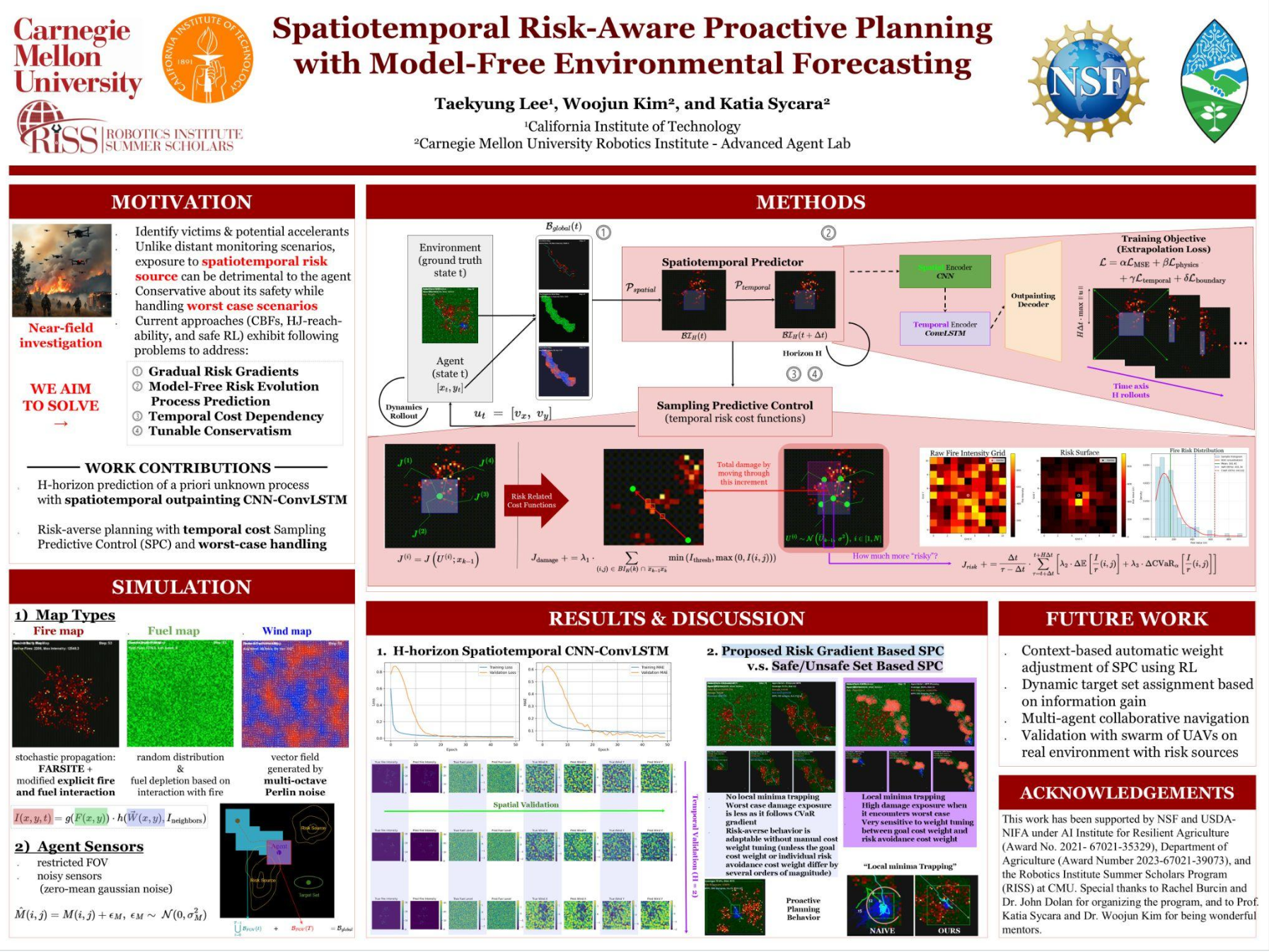
Most recently, I was a Frederick W. Drury, Jr. SURF Fellow at Caltech's Autonomous Robotics and Control Lab (ARCL), developing multi-agent fault detection and isolation frameworks using graph neural networks. Also, I was a Robotics Institute Summer Scholar (RISS) at Carnegie Mellon University, working on spatiotemporal risk-aware planning for autonomous navigation in hazardous environments.
My research experience spans learning-based adaptive control, model predictive path integral control, and autonomous exploration with SLAM. I am also a proud recipient of the Korean Presidential Science Scholarship.
Autonomous Robotics and Control Lab, California Institute of Technology
Advised by Professor Soon-Jo Chung
Pasadena, CA
Advanced Agent & Robotics Technology Lab, Carnegie Mellon University
Advised by Professor Katia Sycara
Pittsburgh, PA
Autonomous Robotics and Control Lab, California Institute of Technology
Advised by Professor Soon-Jo Chung
Pasadena, CA