Projects
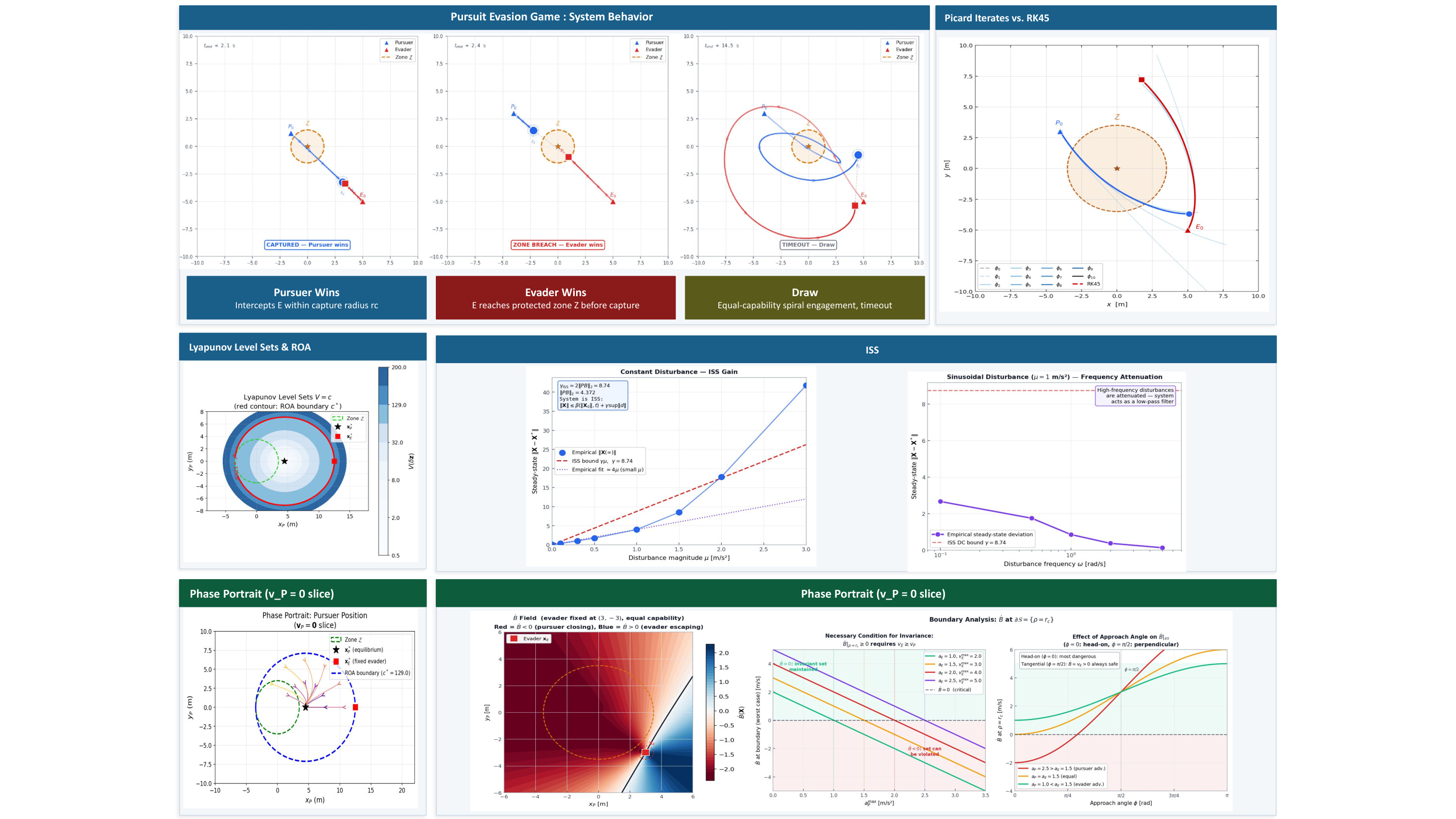
Pursuit-Evasion Game Dynamics: Analysis
Individual Project · California Institute of Technology
Applying nonlinear dynamics theory — Lipschitz bounds, Lyapunov stability, ISS, and barrier functions — to formally analyze a two-agent pursuit-evasion game where a pursuer tries to intercept an evader before it reaches a protected zone.
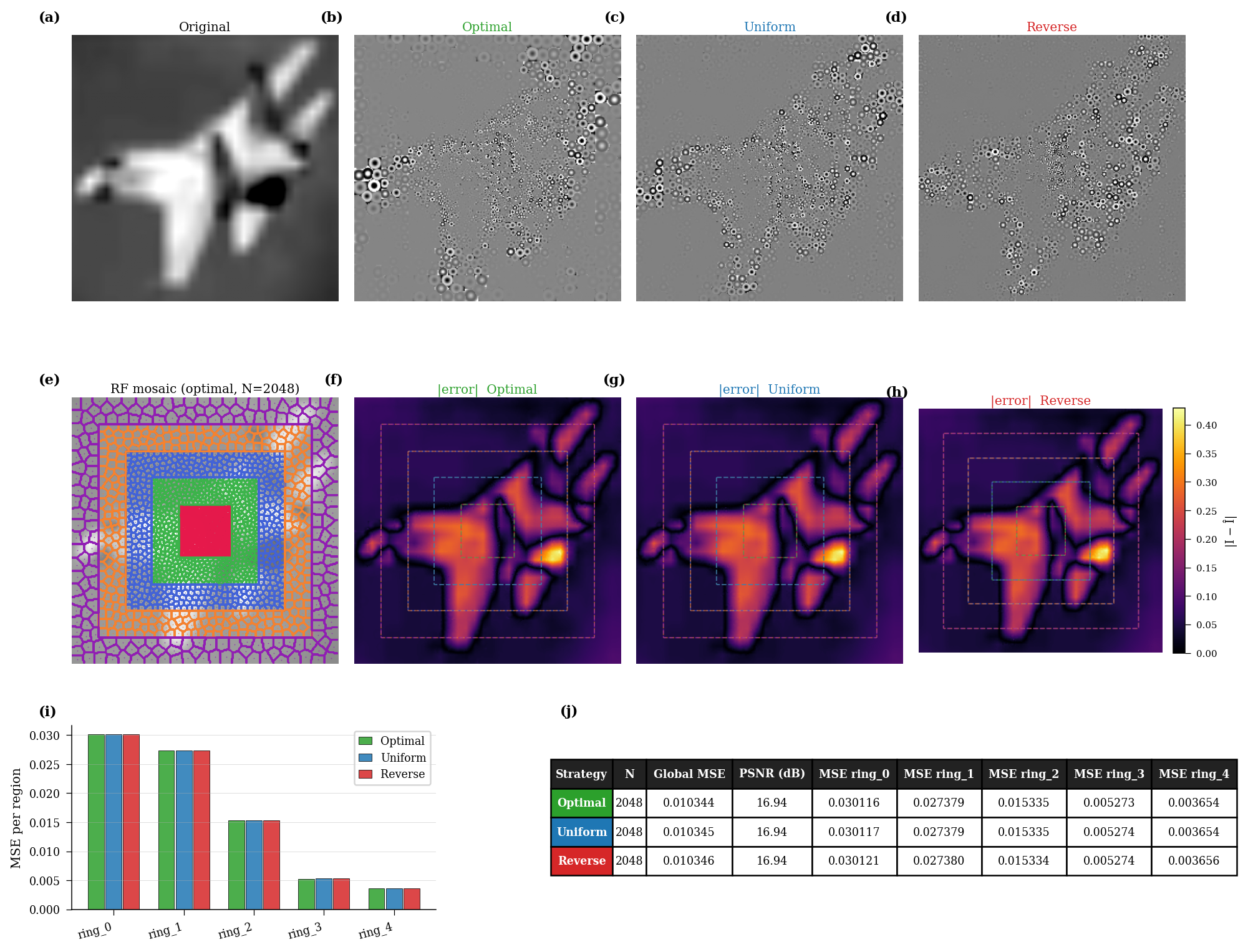
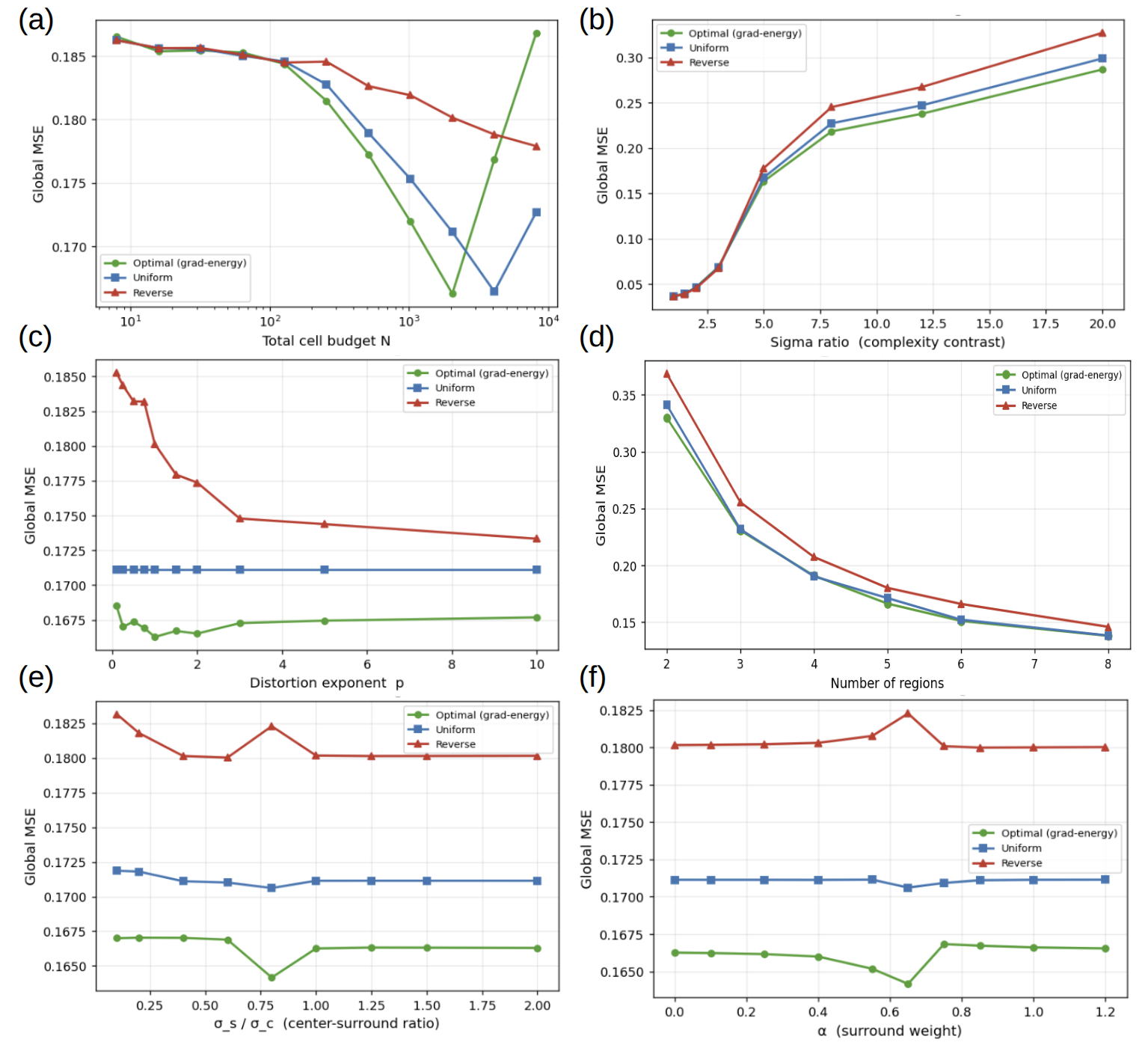
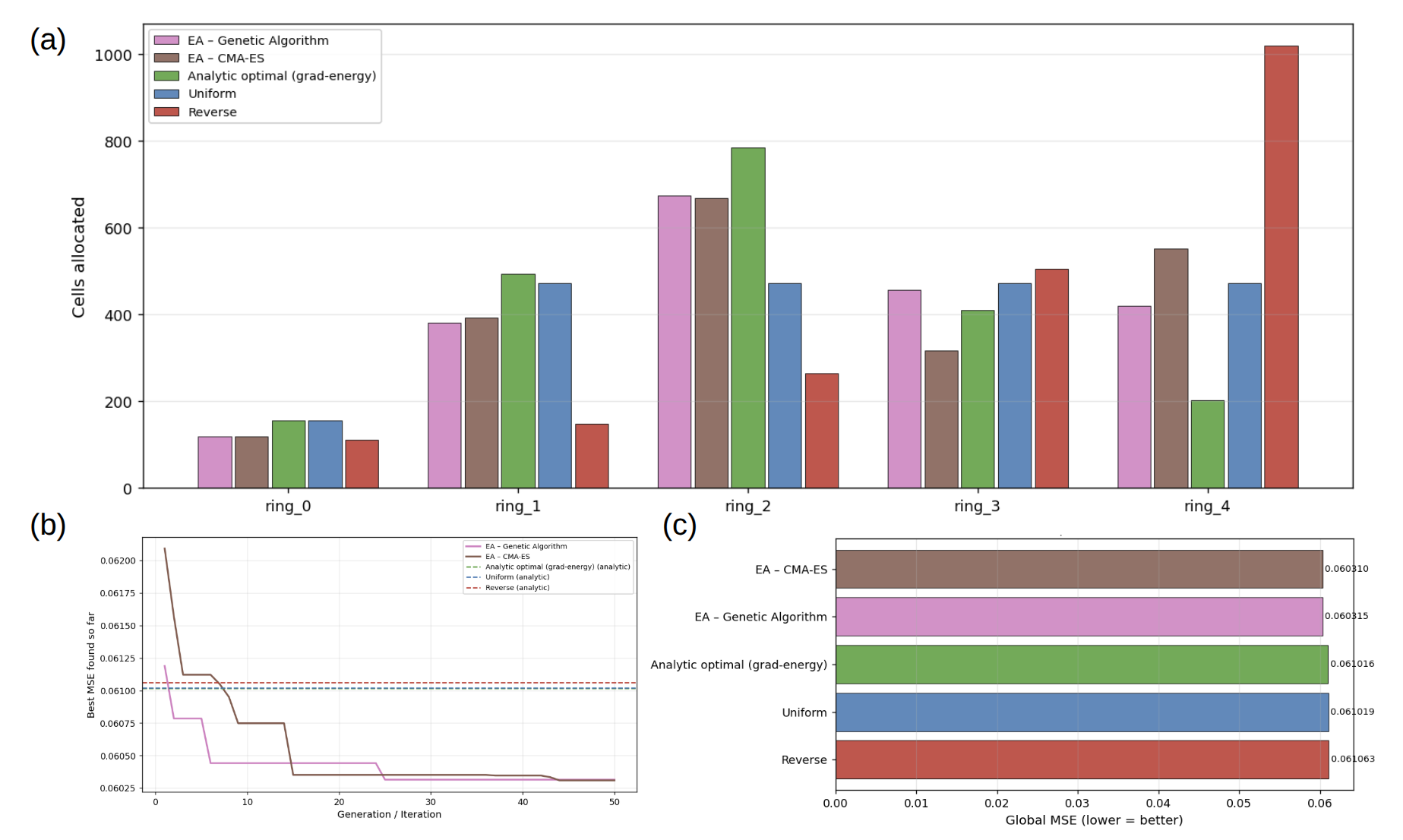
Optimal Retinal Ganglion Cell Allocation under Fixed Channel Budgets
Team Project · California Institute of Technology
The primate retina must compress high-dimensional visual input into a limited number of RGC spike trains. Because the fovea dedicates 80% of ganglion cells to the central field, we hypothesize that nonuniform allocation is information-theoretically optimal. We model RGC distributions as a fixed-budget problem, treating cells as DoG receptive fields tiled via $k$-means Voronoi cells with center radius $\sigma_c = s\sqrt{A_i}$, and compare allocation strategies against rate-distortion theory, which predicts $n_i \propto c_i^{1/(1+p)}$. Across budgets $N = 8 \sim 8192$, gradient-energy-optimal allocation consistently yields the lowest reconstruction MSE, and evolutionary learning converges toward—and ultimately surpasses—the analytic optimum, supporting the hypothesis that the fovea's cell density reflects complexity-matched, rate-distortion-optimal coding.
To Think or Not to Think: Task-Dependent Reasoning for Event Prediction
Team Project · California Institute of Technology
We systematically investigate how reasoning budget affects MLLM performance on temporal event prediction from dashcam footage — brake timing prediction (BDD-A) and binary crash prediction (CCD) — using Gemini 2.5 Flash. Contrary to intuition, more reasoning degrades timing accuracy (zero-budget is optimal) while longer reasoning improves crash detection, revealing task-dependent scaling behavior. We further introduce iterative feedback refinement, showing that providing prior reasoning traces as temporal context significantly boosts accuracy without access to previous video segments.
Model Predictive Path Integral Control for Obstacle Avoidance
Individual Project · California Institute of Technology
Sampling-based trajectory optimization with CVaR risk metrics for safety-critical obstacle avoidance, achieving 100% success across 20+ randomized environments with 87% reduction in safety violations.
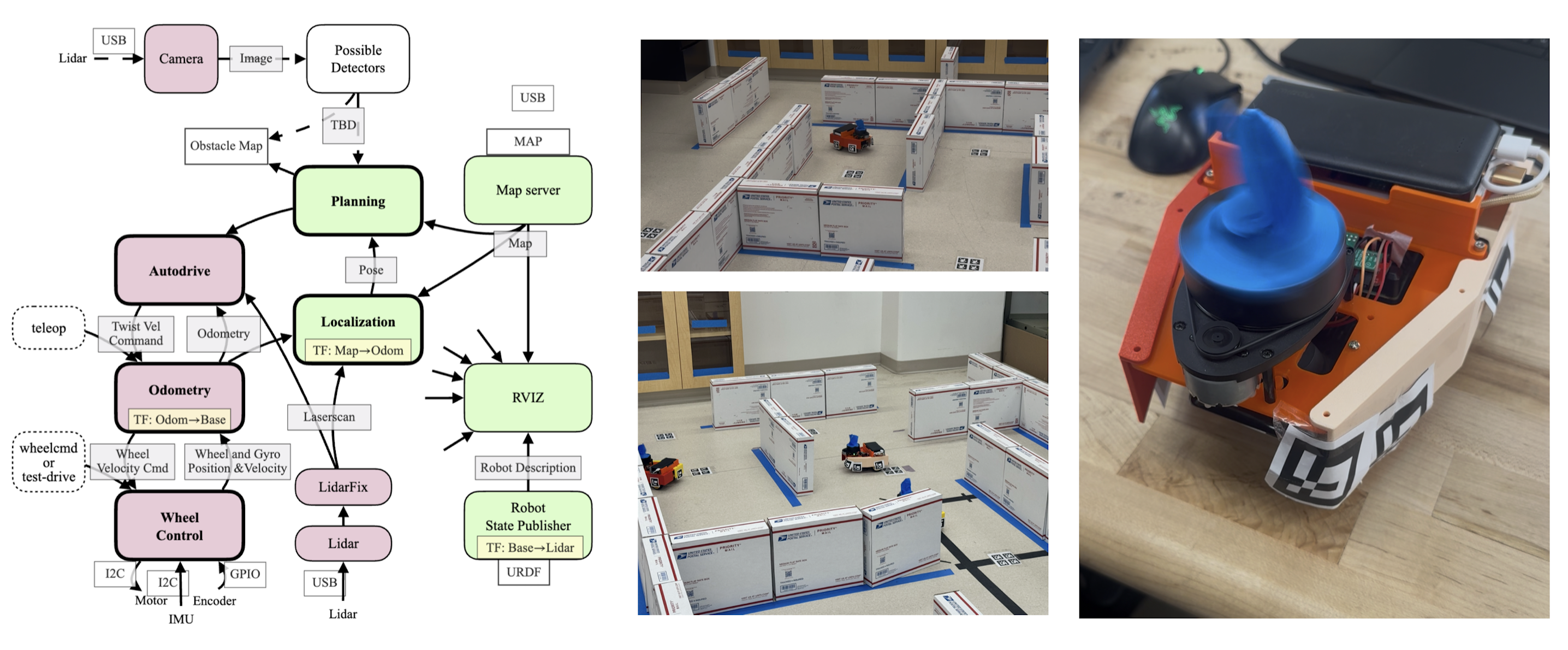
ROS 2 Autonomous Pac-Man Explorer
Team Project · California Institute of Technology
Full ROS 2 navigation stack for autonomous maze navigation on a Raspberry Pi robot, with dual-tree RRT-Connect planning and scan-to-map LIDAR localization at 200 Hz.